Auch wenn die Naza eine sehr leicht einstellbare Möglichkeit bietet, gestaltet sich die Senderprogrammierung nicht immer einfach.
Hier möchte ich euch eine step-by-step Anleitung aufzeigen, mit der ihr die Naza komplett einstellt.
- Naza an den Empfänger anschließen
Die einfachste Möglichkeit bietet das Summensignal. Beim GR16 wird dieses Signal über den Ausgang 8 des Empfängers ausgegeben. Den verbindet ihr mit dem Kanal X2 der Naza (Achtet auf die korrekte Polung des Anschlusses) - Einstellen des Summensignals am Sender
– Im Hauptmenü das Telemtry-Menü öffnen
– Mit dem rechten Sensortasten soweit rechts klicken bis das Menü „RX Servo Test“ erscheint.
– Unter „CH Out Type“ von „Once“ zu „Sum O8“ wechseln - Grundeinstellungen des Modells
– Wechselt in das Hauptmenü „Grundeinstellungen“
– Wählt „Modellname wählen (…..)“ und tragt hier den Namen eures Modells ein.
– „Steueranordnung“ stellt ihr auf „2“ (Gas ist links)
– „Motor an K1 kein“
– „K8 verzögert Nein“
– „Leitwerk Normal“
– Querr./Wölb 1QRNun folgen noch einige unterpunkte dir ihr überspringen könnt bis ihr zu folgendem Punkt kommt:- „Empf. Ausg.“ mit dem Pfeil rechts und der Set Taste ist Untermenü und die Ausgänge wie folgt einstellen.– S2 — Ausgang 1
— S3 — Ausgang 2
— S1 — Ausgang 3
— S4 — Ausgang 4
— S5 — Ausgang 5
— S7 — Ausgang 6
— S6 — Ausgang 7
— S8 — Ausgang 8– mit ESC das Untermenü verlassen- Solltet ihr den Empfänger schon gebunden haben, steht bei „geb. Empf. E08“ ist das nicht der Fall, steht dort „BINDEN“ und ihr müsst erst die Taste am eingeschalteten Empfänger drücken und dann am Sender auf „BINDEN„. Dann sollte die Anzeige, nach erfolgreichen Binden, dort angezeigt werden.
- Gebereinstellungen
Die Gebereinstellungen steuern die Einstellungen der Geber bzw. Schalter und Poties eures Senders. Was die jeweiligen geber auslösen, schreibe ich dahinter.Die jeweiligen Geber sind auch auf dem Sender mit den Nummern versehen. Um sie auszuwählen, klickt man den unkt an und schaltet den Geber. Er wird dann im Menü mit der Nummer angezeigt.- Wechselt nun im Hauptmenü zu den Gebereinstellungen.– „E5 / Geb.7“ (Potie oben links – Steuerung X1 der Naza)
– „E6 / Geb.9“ (3-fach Schalter link oben, vorne – Steuerung der Flugmodi (GPS/ATTI/MANUAL))
– „E7 / Geb.10“ (3-fach Schalter rechts oben, vorne – Steuerung des IOC [X2] (Home Lock/Course Lock/OFF) - Servoeinstellungen
Hier stellen wir die Servo/Ausgangsrichtung ein. Zusätzlich können wir Kurven für einen Ausgang einstellen.- Wechselt in das Menü „Servoeinstellungen“
– S2 | <-
– S4 | <-
– S6 | <- | -4% | 85% 84%
– S7 | <-Servowege die hier nicht angegeben sind, bleiben auf dem Standart (->) stehen.Der Servo/Ausgang „S6“ ist euer „Geber 9“. Um die Konfiguration zu verändern, müsst ihr den Geber einschalten. Diese Werte steuern, dass wir mit dem Schalter auch richtig in den Flugmodi-Bereich der Naza schalten. - Freie Mix
Diese Konfiguration steuert die „Mixer“ eures Senders. Das bedeutet, wir beeinflussen mit den Mixern bereits bestehende Steuerungen.Mixer 1 – Failsafe in jedem FlugmodusM1| | 6->6 | Geb.8 (oberer linker Schalter, hinten. Zum selektieren, Schalter umschalten)Wechselt mit den Pfeiltasten auf „=>“ und bestätigt mit „SET“ um in das Untermenü zu gelangen.Um die Werte zu sehen bzw. verändern zu können, müsst ihr den „Geber 8“ einschalten.
Dort müsst ihr folgende Werte einstellen:
Weg -35% -150%
Offs +77%
Standartmäßig stellen sich beide Werte des „Weg“ symetrisch ein. Stellt damit erstmal den zweiten Wert „-150%“ ein. Stellt dann den Rechts/Links Sensortasten die Konfiguration auf „ASY“ um und konfiguriert den ersten Wert „-35%“Nun habt ihr den „Schalter 8“ so programmiert, dass
Mit ESC könnt ihr wieder zurück um den nächsten Mixer einzustellen.
Mixer 2 – Vereinfachter Kreisflug nur mit dem rechten Stick des Senders
M2| | QR->SR | Geb. 3 (Vorderer kleiner Schalter, rechts, zum selektieren, Schalter umschalten)
Wechselt mit den Pfeiltasten auf „=>“ und bestätigt mit „SET“ um in das Untermenü zu gelangen.
Um die Werte zu sehen bzw. verändern zu können, müsst ihr den „Geber 3“ einschalten.
Dort müsst ihr folgende Werte einstellen:
Weg +40% +40%
Offs 0%Mit ESC könnt ihr wieder zurück ins Hauptmenü
- FAILSAFE
Die Naza verfügt über einen eigenen Failsafe Modus. Den kann man gewollt oder ungewollt auslösen. Ein typischer gewollter Fall wäre das so genannte „RTH“ oder auch „Return To Home“. Legt ihr den „Schalter/Geber 8“ um, kommt der Multikopter zu euch zurück (Sofern GPS vorhanden ist und der Homepoint vor dem Start richtig gespeichert wurde) oder landet vorsichtig an Ort und Stelle wo er gerade ist.Ein typischer ungewollter Fall wäre ein Ausfall des Senders oder ein Abriss der Funkverbindung zwischen Sender und Empfänger.Den gewollten Fall haben wir bereits im Mixermenü konfiguriert. Nun geht es an den ungewollten Fall. Dazu muss der Empfänger nach Abriss der Funkverbindung/Senderausfall wissen, in welcher Position er die ganzen Ausgänge schalten muss.- Wechsel in das Menü „Failsave“
– Stelle alle Kanäle auf „Halt“
-Nun gehe auf „STO“ um die Einstellung im Empfänger zu speichern (Diese Daten können nur gespeichert werden, wenn das Modell eingeschaltet und mit dem Sender gekoppelt ist) - Modell für den Notfall auf SD-Karte speichern
An diesem Punkt gehe ich davon aus, dass ihr eine SD-Karte in den Sender eingelgt habt. Solltet ihr das nicht haben, solltet ihr das nun tun oder den Punkt überspringen.- Wechselt in das Hauptmenü „Mod Speich“
– „Export zu SD“
– Modell auswählen
– Abfrage ob exportiert werden soll, mit „JA“ bestätigenZu beachten ist, die exportierten Daten auf der SD-Karte können nur auf einer MX16 zurückgespielt werden! Ein kopieren auf einen anderen Sender wir MX20 oder MX12 ist NICHT möglich! - Konfiguration in der NAZA Software prüfen
1. Sender einschalten
2. Prüfen das alle Schalter und Sticks auf der richtigen Position sind
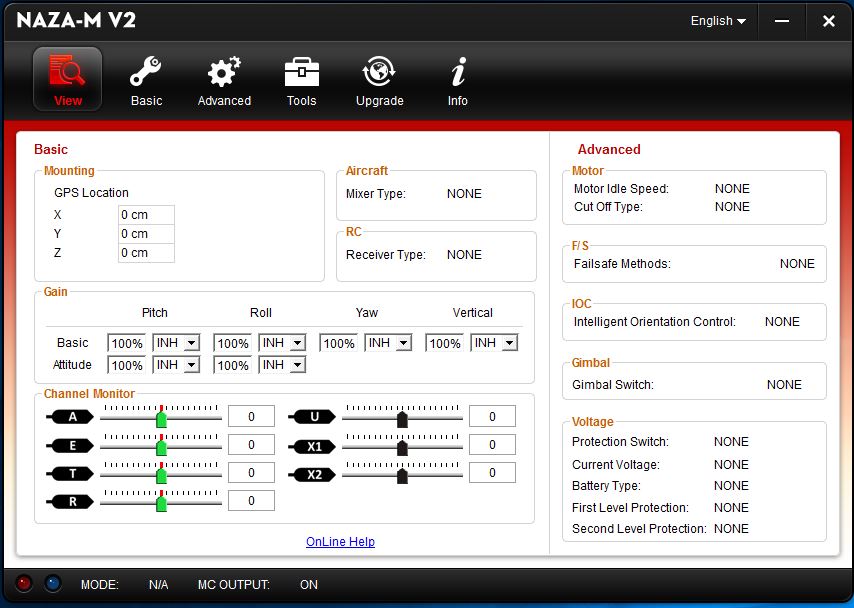
2. Modell einschaltenDiese Reiehnfolge MÜSST ihr immer beibehalten, egal bei welchem RC Modell. Diese Reihenfolge ist bei der NAZA nicht zwingend notwendig weil sie in der Regel nicht „Scharf“ geschaltet ist und somit nichts passiert, aber in anderen Fällen werden die Ausgänge des Senders eventuell in einen undefinierten Zustand versetzt, was bedeuten könnte, dass euer Modell aufeinmal die Motoren hoch dreht oder sonst etwas schlimmeres passieren kann!Nachdem nun alles eingeschaltet ist, schließt die NAZA an den Computer an und öffnet die NAZA Software.1. Viewmodus

In dem Fenster habt ihr eine Übersicht über alle wichtigen Parameter und könnt schon alle Sticks und Schalter testen.
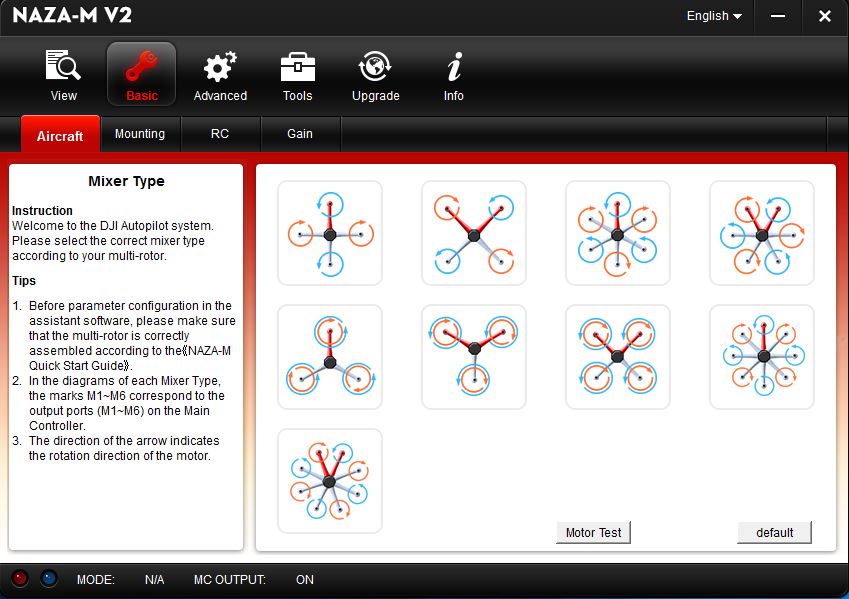
2. Basic – Aircraft

In dieser Ansicht stellt ihr ein, welche Art von Multikopter ihr vor euch habt. Beachtet dringend auch die Drehrichtung der Motoren!
Auf der linken Seite werden euch in jedem Menü, tooltips angezeigt was die jweiligen Menüs bedeuten.
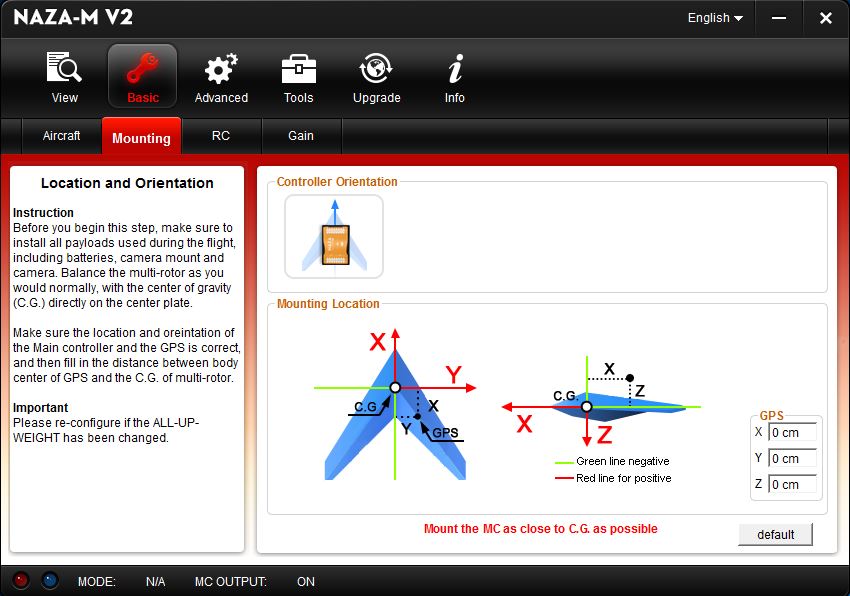
Auf dieser Seite könnt ihr ebenfalls die Drehrichtung eurer Motoren testen. Es ist wichtig, die Rotorblätter zu demontieren wenn man die Drehrichtung testet. Man weiß nie, wie ein Motor im einzelnen auf die kurzen ansteuerungen reagiert.3. Basic – Mounting
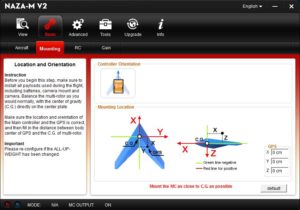
In dieser Übersicht stellt ihr das Mount eures GPS Empfängers ein. Diese Konfiguration sieht leicht aus, aber man macht schnell fehler, daher möchte ich auf ein Video von Arthur Konze verweisen.
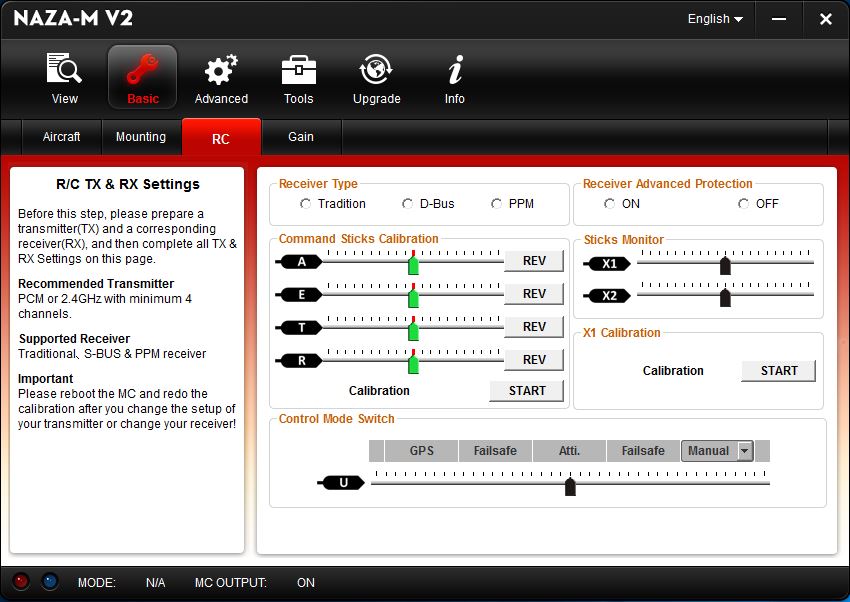
4. Basic – RC
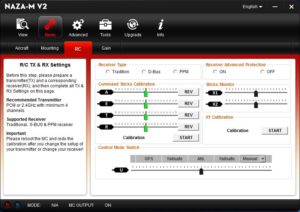
Dieses Menü ist eines der wichtigsten. Wir haben die Kofiguration als Summensignal konfiguriert, daher müsst ihr an diesem Punkt bei „Receiver Type“ auf „PPM“ stellen.
Überprüft auch, ob alle Sticks richtig laufen und bei neuztraler Stellung (alle Sticks in der Mitte) auch „grün“ angezeigt werden. Ist das nicht fer Fall, könnt ihr eine „Calibration“ der Sticks starten. Dazu werden alle Sticks ins Maximum bewegt, danach könnt ihr mit „STOP“ die Kalibrierung stoppen. Nun sollten alle Sticks die Mitte anzeigen.
Ist das danach noch immer nicht der Fall, muss eine Kalibrierung der Sticks im Sender durchgeführt werden (Dazu mehr im Handbuch eurer MX16)Testet auf dieser Seite den Flugmodusschalter ob alle Flugmodi richtig erkannt werden (GPS/ATTI/MANUAL). Ebenfalls solltet ihr in jedem Flugmodus den Failsafe-Schalter testen. In jedem Flugmodus muss nach aktivieren des Failsafe, das Failsafe aktiv sein!!!
Schaltet euren Sender nun zusätzlich aus, um zu sehen, dass im Falle eines Abbruchs des Signals, die NAZA ebenfalls in den Failsafe schaltet.
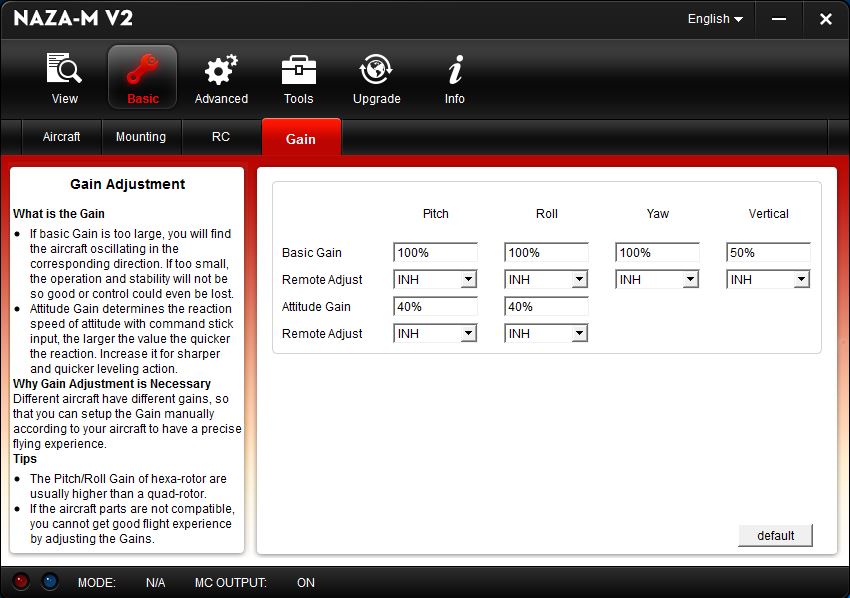
5. Basic – Gain

Bei anderen Flightcontrollern nennt sich dieser Punkt vermutlich PID-Werte. Bei NAZA sind es die Gainwerte. Sie regeln, wie schnell die NAZA einer Lageveränderung reagiert und wie stark.
Zum Beispiel, ihr schwebt und merkt, dass euer Modell am Zittern ist bei einem Ausgleichen der Fluglage, dann wird es vermutlich an den Gain-Werten liegen.
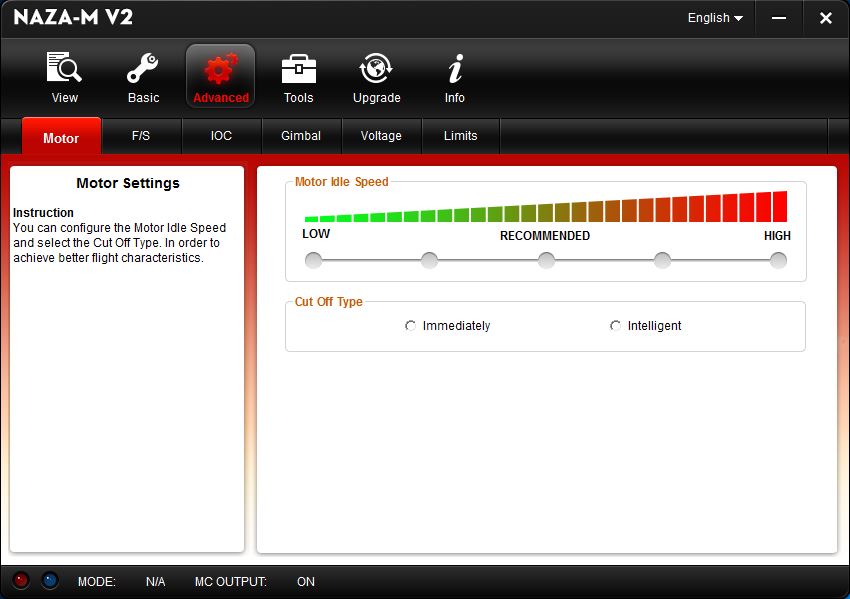
In der Regel kann man jeden Multikoter erst einmal mit den Standart-Gainwerten fliegen. Trotzdem ist eine Konfiguration sehr sinnvoll um einen ruhigen ud sicheren Flug zu gewährleisten.6. Advanced – Motor

In diesem Menü stellt ihr das Startverhalten der Motoren ein sowie den „Cut Off Type“.
Schaltet ihr die NAZA scharf, drehen sich die Motoren im Idle Speed. Bei manchen Motor passiert es aber schonmal, dass die Motoren gar nicht anlaufen oder zu schnall anlaufen, dass kann man mit dem „Motor Idle Speed“ ausbessern.Ebenso den „Cut Off Type“. Hier wird gesteuert, wann und wie die Motoren abschalten. „Intelligent“ ist dabei die bessere Wahl weil die Motoren auch abgeschaltet werden, wenn der Kopter zu weit in die Neigung geht, was nur bedeuten kann, dass er abgestürzt ist, oder einen defekt hat.
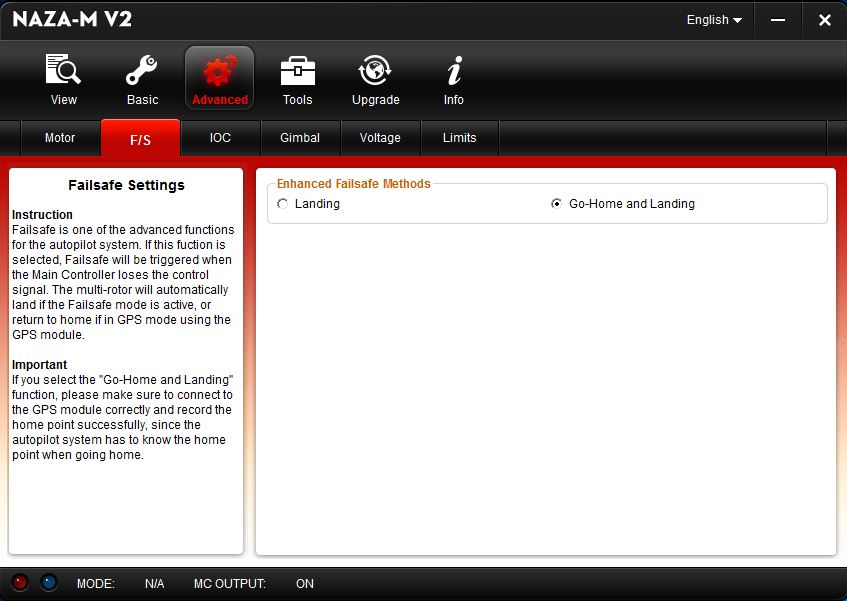
7. Adavanced – F/S

Was soll passieren, wenn der Flightcontroller in den Failsafe schaltet? Zwei Möglichkeiten bietet die NAZA uns hier, ein Landen an Ort und Stelle oder ein „Go-Home and Landing“. Für das letztere ist GPS und ein gespeicherter Homepoint vorraussetzung!!!
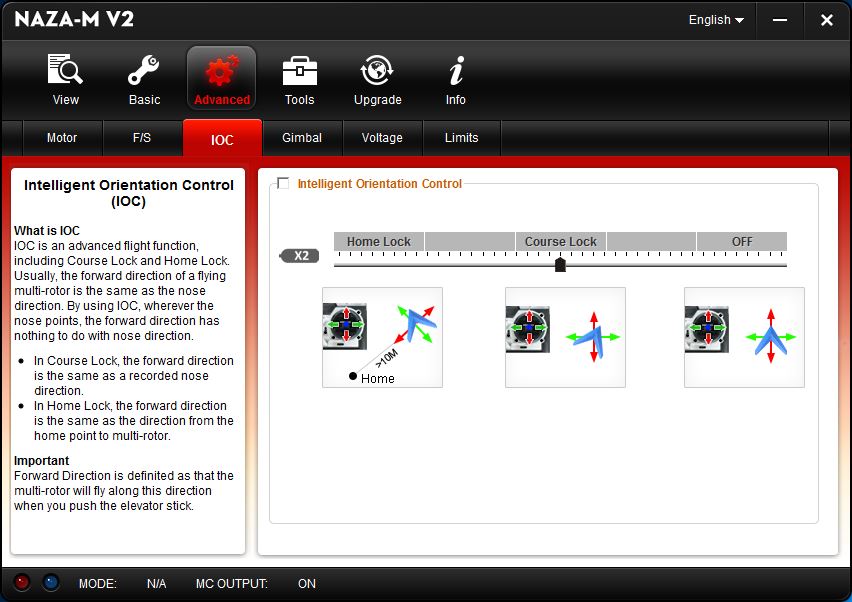
8. Advanced – IOC

Das IOC ist ein intelligenter zuschaltbarer Assistent bei dem die Nase des Modells keine Rolle spielt. Fliegt ihr also vorwärts und dreht den Multikopter mit dem Ruder, fliegt er trotzdem weiter gerade aus. Diese Funktion haben wir ebenfalls auf einen dreifach Schalter gelegt. HIer solltet ihr testen, ob dier Schalter alle Flugmodi richtig schaltet.
9. Advanced – Gimbal

Ihr habt die Möglichkeit anstatt 8 Motoren, die letzten beiden Motorausgänge für ein Servo-gesteuertes Gimbal zu verwenden. Heutzutage wird das wohl kaum noch jemand machen, aber es ist eine günstige Alternative zu einem Brushless-Gimbal.
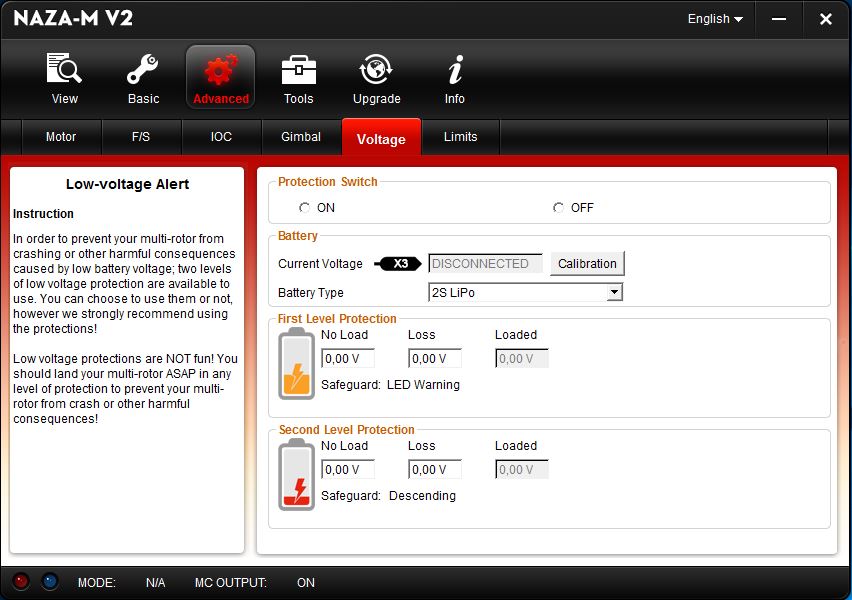
10. Advanced – Voltage

Die NAZA kann auf euren Akku aufpassen und mittels der Status-LED signalisieren, wenn der Akku sich dem Ende neigt.
Ebenso, zwingt euch die Naza auf dem zweiten Level der Warnung zur Landung und lässt den Kopter langsam sinken.
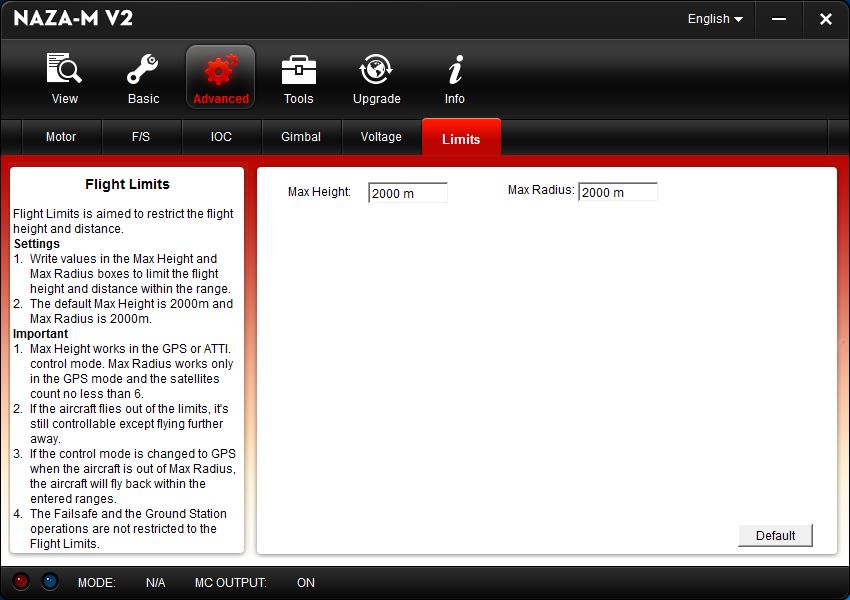
Die Werte solltet ihr individuell auf euren Akku-Typ abstimmen und eventuell kalibrieren.11. Advanced – Limits

Vermutlich wird jeder vernünftige Pilot nur in sichtweite fliegen. Doch hier habt ihr die Möglichkeit die maximale Höhe und Entfernung ab dem gespeicherten Homepoint, festzulegen. Die NAZA wird automatisch aufhören zu steigen oder sich von euch zu entfernen ab dem eingestellten Wert.
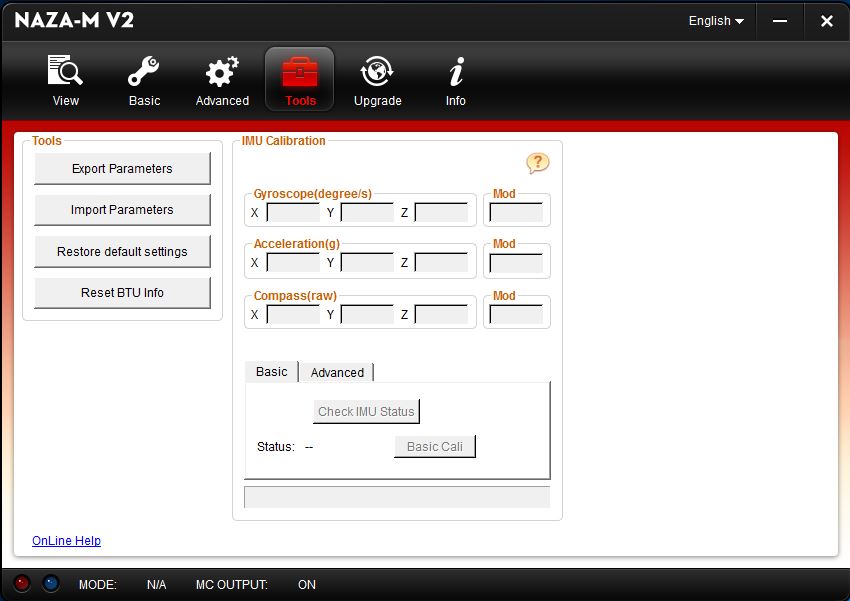
Man könnte sagen, ihr setzt die NAZA in einen virtuellen Raum in dem sie nicht die Möglichkeit hat durch die Wände zu fliegen.12. Tools

Die Tools geben euch einen Überblick über die Kompass und Gyroskopwerte und zeigen euch an, ob eine Kalibrieung notwendig ist.
Vor einem ersten Start ist eine Kalibrieung der Gyroskope und des Kompasses definitiv pflicht! - WeiteresIhr habt nun einen eingestellten Multikopter. Bitte beachtet die rechtliche SItuation in eurem Land und verstoßt gegen keine Gesetze. Haltet euch von Flughäfen oder Flugplätzen fern! Holt euch imn Notfall eine Info bei der Luftsicherungsbehörde!Und zum Schluss, so ausführlich meine Dokumentation auch war, ihr handelt stets auf eigenes Risiko! Ich übernehme keine Haftung für jegliche Konfigurationsprobleme oder Schäden die durch meine Dokuemtation enstanden sein könnten!
Überprüft also vor dem Abflug immer euer Fluggerät!